系统开发简要介绍:
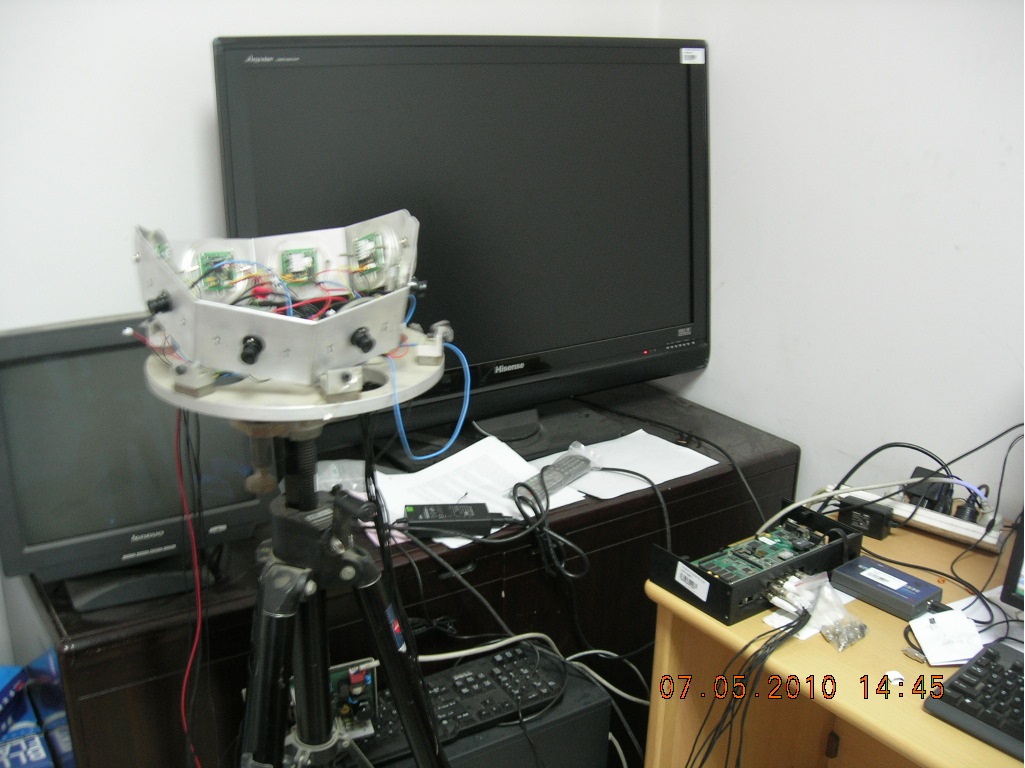
1.高清嵌入式全景摄像机 (Panoramic camera) |
|
项目资助单位:航天科工风华机械厂 项目情况简介:研究通过图像特征点的可靠提取、配准与融合算法,进而搭建系统获取180度范围内的视频影像。系统采用了DSP处理器,正在向FPGA改进。 |
|
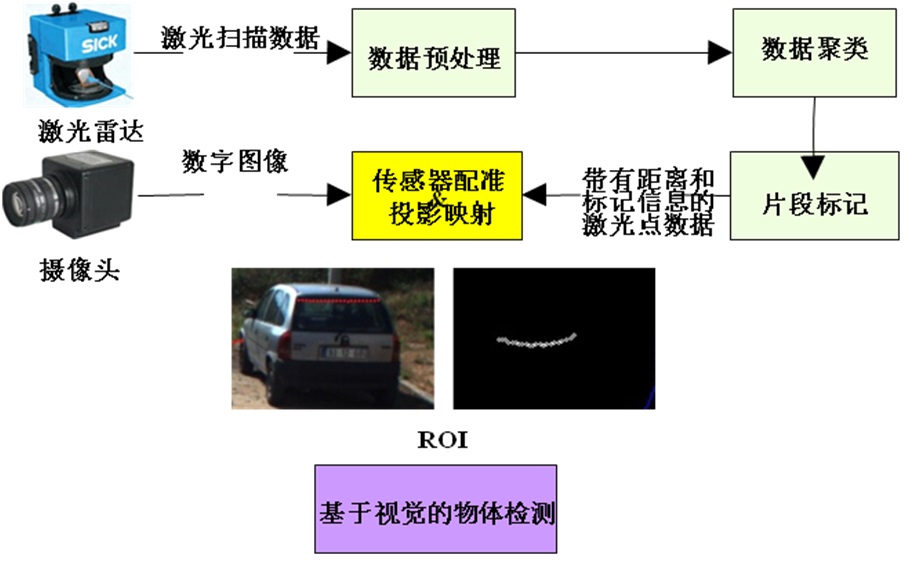
2.基于激光器与图像信息融合的飞行器目标威胁告警、辅助安全驾驶系统 |
|
项目资助单位:科技部、自然科学基金委 项目时间范围:2011年1月~2013年12月 项目情况简介:本项目拟通过图像与激光器信息的融合,可靠的检测与跟踪车辆周边的行人,结合对于驾驶环境的建模,对可能的行人碰撞、追尾等进行预警。 |
 依赖于空管雷达,通过对于飞机本身的目标跟踪,获取飞机轨迹,结合跑道上的摄像头和激光雷达获取的信息,对跑道障碍物造成威胁进行预警。 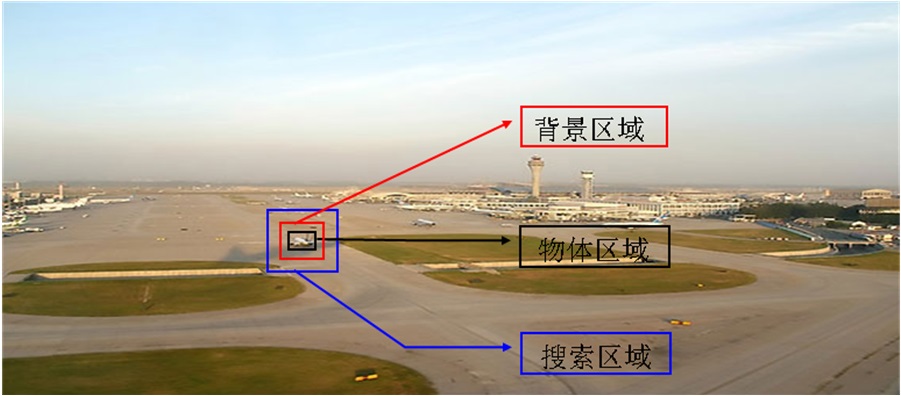 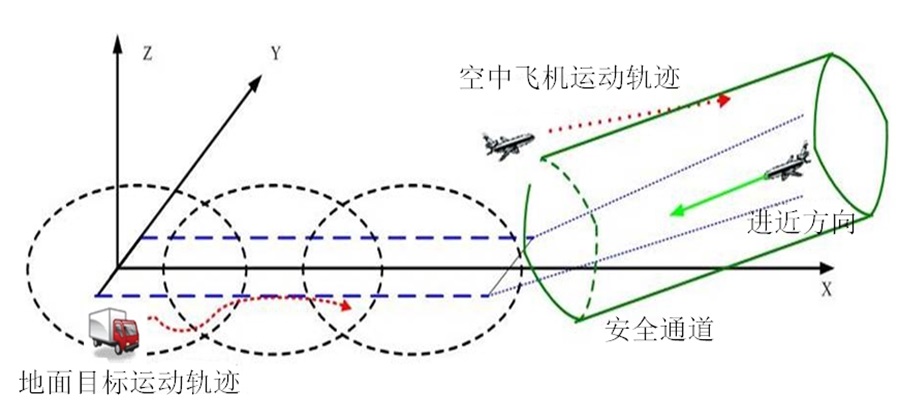
|
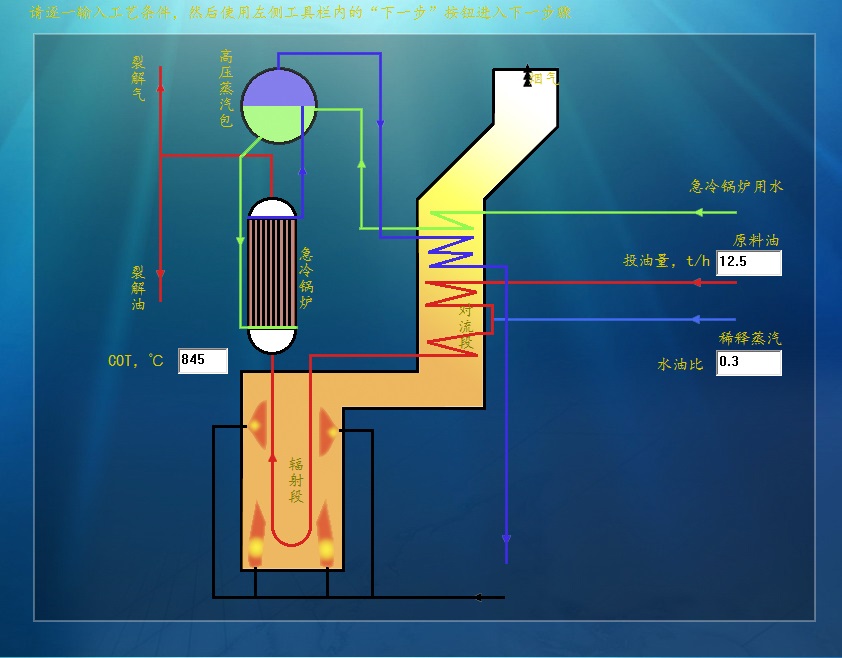
3. 乙烯收率预测及优化软件(Ethylene production prediction and control condition optimization with SinoPEC) |
|
项目资助单位:中国石化北京化工研究院 项目情况简介:基于支撑向量机自动预测裂解物产出,服务于工厂生产优化。此项技术预测误差控制在5%范围内,预测速度满足实时要求,已在中国石化两个石化生产企业试用。 |
 |
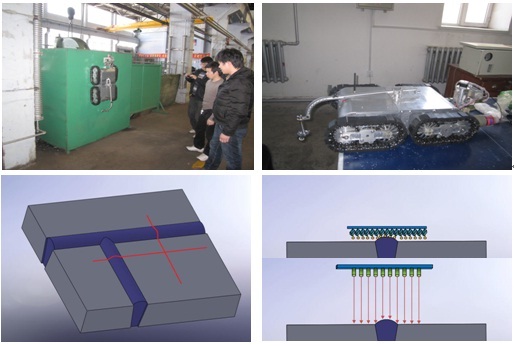
4.工业检修爬壁机器人系统(Climbing robot for industry inspection) |
|
项目资助单位:航天科工风华机器厂 项目情况简介:正在研发的爬壁机器人采用四履带式永磁吸附,具有净负荷能力高(≥20kg)、灵活性好、越障能力强、重复定位精度高、续航能力强等特点。可在铁磁介质表面爬行,主要用于风力发电机组塔筒或化工企业罐状设备的表面焊缝探伤检测。系统有效融合了多源信息感知与自适应跟踪技术。 |
 |
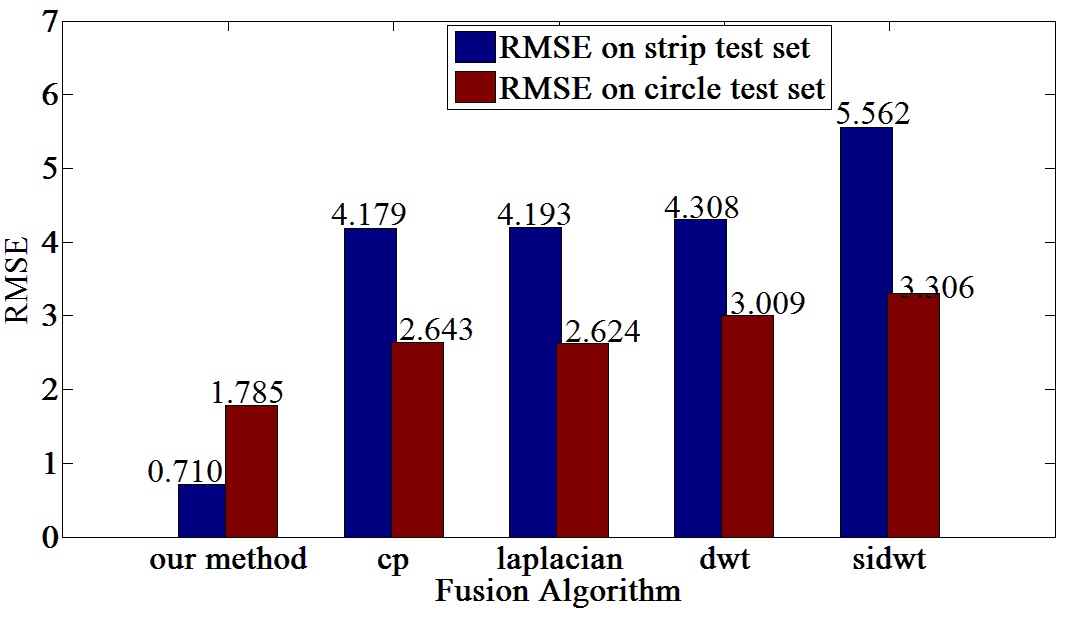
5.多聚焦图像融合(Multi-focus image fusion algorithm) |
| 项目情况简介:提出了一种全新的多聚焦图像融合算法,适用于刑事侦查图像、昆虫图像等显微图像系统。在实际应用系统上的测试表明,所提出的算法误差较传统方法更小。 |
  |